🦿«Роскосмос»
запускает производство роботизированных протезов для реабилитации
Российская госкорпорация «Роскосмос» начинает разработку
и выпуск инновационных протезов нижних конечностей «Актив-2», оснащенных микропроцессорным коленным модулем.
Эти роботизированные устройства обеспечивают естественную походку, повышая мобильность и комфорт.
Технология делает движения более плавными и адаптивными благодаря встроенному процессору.
Предприятия ракетно-космической отрасли осваивают выпуск реабилитационных систем.
Планируется, что к 2030 году доля высокотехнологичных изделий в производстве достигнет 50%.
Проект «Актив-2» — первое полностью отечественное серийное решение такого уровня,
ускоряющее внедрение передовых протезов в медицину https://t.me/world_of_robotics/5749
-------------------------------
► и ещё ►
► ранее в теме есть инфо о роботах "Марфа" и "Теледроид" ►
► и далее ещё видео от 8 мая 2025 ►
В России создан робот "Марфа"
и готовится к полету робот "Теледроид" 2025
http://vk.com/video-21671583_456252554
----------------------------
► и вот инфо от декабря 2025 ►
🛰 Робот «Теледроид» полетит на МКС летом 2026 года
Российские специалисты завершили испытания летного образца телеуправляемого андроида «Теледроид»,
предназначенного для работы в открытом космосе.
Устройство доставят на Международную космическую станцию с июня 2026 года.
Ожидается, что экипаж 75-й экспедиции сможет применить робота уже в августе того же года для работ на внешней обшивке модуля «Наука».
Андроид будет выполнять
передачу инструментов,
подсветку рабочих зон
и стандартные операции с оборудованием,
снижая нагрузку на космонавтов.
В ближайшее время планируется передать опытный экземпляр в Центр подготовки космонавтов для обучения и тренировок.
https://t.me/world_of_robotics/5756
--------------
► подробности ►

О целевой работе "Теледроид" рассказывает заместитель начальника лаборатории
"Системные и проектно-поисковые исследования робототехнических систем космического назначения" АО "ЦНИИмаш" Александр Гребенщиков:
Название проекта – "Теледроид" – сокращённое словосочетание "телеуправляемый андроид".
Идея создания андроида (человекоподобного робота) для выполнения работ в открытом космосе и на Луне возникла в ЦНИИмаше ещё в 2013 году.
Андроид – это робот, внешне напоминающий человека
и обладающий такими же двигательными возможностями и размерами "рук", "пальцев", "головы", корпуса, "ног".
Данный робот – антропоморфный (торсовый андроид),
он отличается от полноценного андроида отсутствием "ног",
поскольку в этой работе они не нужны, а используется только верхняя его половина (торс).
Идеология и координация работы принадлежат ЦНИИмашу.
ЦНИИмаш является официальным постановщиком данной целевой работы, которая раньше называлась космическим экспериментом.
В ЦНИИмаше разработали концепцию, техническое задание, методические основы, программу работы.
ЦНИИмаш также отвечает за научно-техническое сопровождение работы, её результаты и их внедрение.
А создание самого робота и системы управления им осуществляет Научно-производственное объединение "Андроидная техника".
Другой участник работы – Ракетно-космическая корпорация "Энергия"
– отвечает за доставку аппаратуры робота на борт Международной космической станции (МКС) и интеграцию её в системы станции.
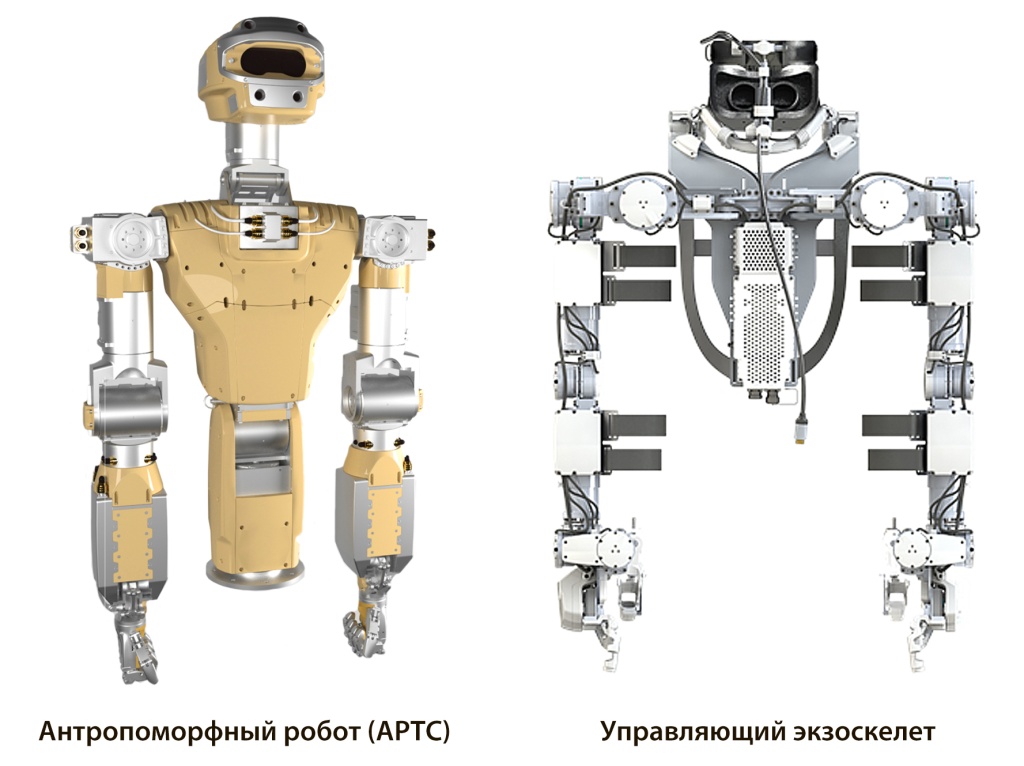
В ноябре 2018 года был представлен эскизный проект данной антропоморфной робототехнической системы (сокращённо – АРТС).
В настоящее время уже успешно завершены все испытания опытного образца и готов лётный образец, который также проходит необходимые испытания.
Следует отметить, что АРТС создана в основном с использованием электрических, электромеханических и электронных компонентов российского производства,
а доля импортных компонентов зарубежного производства незначительна и в будущем может быть замещена.
В частности, такие основные компоненты робота, как малогабаритные силовые электродвигатели космического применения,
являются собственной оригинальной разработкой НПО "Андроидная техника"
и по своим техническим характеристикам не уступают аналогичным лучшим зарубежным образцам.
Телеуправляемый антропоморфный робот (разработчики неофициально называют его "аватаром") создан специально для работы в условиях открытого космоса
– для помощи космонавтам в выполнении внекорабельной деятельности.
Основная цель проекта – снижение риска и затрат, связанных с работой экипажа в открытом космосе,
ведь каждый выход человека за пределы космической станции потенциально опасен для него, особенно в нештатных ситуациях, и кроме того, стоит больших денег.
"Теледроид" – это уникальный проект,
поскольку ранее подобный робот, американский Robonaut-2, тестировался только внутри космической станции
и не был предназначен для работы снаружи, в открытом космосе при одновременном воздействии всех факторов космического пространства,
таких как вакуум, радиация, большие перепады температур, невесомость.
В данной работе АРТС будет использоваться для отработки выполнения различных манипуляций на наружной поверхности станции:
передача инструментов,
освещение рабочих зон,
выполнение типовых операций внекорабельной деятельности с помощью таких же инструментов,
которые применяют космонавты при работе в открытом космосе.
Робот может работать в трёх режимах:
1. Режим копирующего управления (основной):
оператор (космонавт), находясь внутри космической станции, управляет роботом, установленным на её наружной поверхности,
с помощью надетого на себя специального устройства – экзоскелета с очками виртуальной реальности,
и робот в точности повторяет (копирует) все движения рук, пальцев и головы оператора.
При этом оператор видит объёмные изображения рабочей зоны и объектов в ней, передаваемые стереотелекамерой "головы" робота,
а также, благодаря силовой обратной связи с помощью экзоскелета,
ощущает на своих руках такие же усилия, которые действуют на "руки" и "пальцы" робота при взаимодействии его с предметами и инструментом.
Всё это отчасти напоминает "аватара" из известного нашумевшего фильма.
2. Режим супервизорного голосового управления:
используя свои интеллектуальные возможности (распознавание голоса и изображений),
робот выполняет голосовые команды, которые ему выдаёт оператор.
3. Автоматический режим:
робот действует по заранее подготовленным программам.
► оригинал изображения ► https://tsniimash.ru/press-center/news/ … spytaniya/
Опытный образец АРТС вскоре будет передан в Центр подготовки космонавтов для обучения и тренировок космонавтов работе с роботом.
Лётный образец АРТС предполагается установить на многофункциональном лабораторном модуле (MЛM)
российского сегмента Международной космической станции, известном как "Наука".
Кроме того, создана управляемая с помощью того же экзоскелета виртуальная модель робота,
которая позволит космонавтам на борту Международной космической станции тренироваться перед работой с физическим роботом.
Это также особенно важно для восстановления навыков управления роботом в длительном полёте.
После завершения всех этапов проверок и испытаний планируется доставить оборудование лётного образца робота на МКС, начиная с июня 2026 года.
Предполагается, что экипаж российской 75-й космической экспедиции на МКС (ориентировочно август 2026 года – март 2027 года) сможет поработать с роботом.
Результаты целевой работы "Теледроид" будут использоваться в подготовке будущих операторов космических робототехнических систем в Центре подготовки космонавтов имени Ю.А. Гагарина.
В перспективе возможно использование роботов подобного типа на будущей Российской орбитальной станции (РОС).
Также существуют зарубежные и российские проекты с использованием торсовых андроидов в составе луноходов (так называемых "кентавров") на Луне.
Прототип такого лунохода, "кентавр" МАРФА, представляющий собой торсовый андроид, установленный на торце самоходной колёсной тележки,
не так давно испытывался космонавтами в Центре подготовки космонавтов имени Ю.А. Гагарина.
Центральный научно-исследовательский институт машиностроения
https://tsniimash.ru/press-center/news/ … spytaniya/
► контекст ►
в разделе ► ВС России тема ► Космические войска - ВКО - ВКС России
и в разделе ► ЭпохА - Наука тема ► Вокруг Света - Земли, Космонавтика



